Future Mobility Applications Need High-Precision Gyroscope
 Future mobility applications such as autonomous vehicles and passenger drones need very accurate positional and orientation information in order for them to operate reliably and safely. Autonomous vehicles and drones have GPS receiver and multiple kinds of sensors such as cameras, LiDARs, and inertial measurement units (IMUs). GPS signals cannot be received in many places such as inside a tunnel or inside an urban canyon. GPS signals are also vulnerable to jamming. Cameras and LiDARs take image or point cloud of surrounding object and calculate autonomous vehicles’ or drones’ positions by comparing with a reference map. However, camera and LiDARs cannot calculate position data when objects surrounding an autonomous vehicle or a drone are difficult to distinguish (e.g. when a street is covered by a snow or when a vehicle is driving inside a tunnel). Cameras and LiDARs also require a lot of computing power to process acquired image and point cloud data as well.
Future mobility applications such as autonomous vehicles and passenger drones need very accurate positional and orientation information in order for them to operate reliably and safely. Autonomous vehicles and drones have GPS receiver and multiple kinds of sensors such as cameras, LiDARs, and inertial measurement units (IMUs). GPS signals cannot be received in many places such as inside a tunnel or inside an urban canyon. GPS signals are also vulnerable to jamming. Cameras and LiDARs take image or point cloud of surrounding object and calculate autonomous vehicles’ or drones’ positions by comparing with a reference map. However, camera and LiDARs cannot calculate position data when objects surrounding an autonomous vehicle or a drone are difficult to distinguish (e.g. when a street is covered by a snow or when a vehicle is driving inside a tunnel). Cameras and LiDARs also require a lot of computing power to process acquired image and point cloud data as well.
An IMU is a very important sensor component for an autonomous vehicle or a drone. An IMU consists of three-axis accelerometers and three-axis gyroscopes. The position of a autonomous vehicle or a drone is calculated by integrating acceletion and rotation rates with time. . Orientation is calculated by integrating angular rate signals measured by gyroscopes. Unlike a GPS receiver, a camera, or a LiDAR, an IMU can calculate position and angular orientation without using external reference signals or external reference objects. Also, IMU uses ;low power (< 1 Watt).
However, the accuracy of position and orientation calculated with an IMU suffers from the drift from bias drift or bias instability of an IMU. In most cases, the error in the position and angular orientation calculated with an IMU is dominated by the bias instability of a gyroscope. Autonomous vehicles and passenger drones therefore require a gyroscope with very low bias instability (< 1 deg/h).
Currently, the only gyroscopes existing on the market that can satisfy this level of performance are a fiber optic gyroscope, a ring-laser gyroscope, a mechanical gyroscope (e.g. dynamic tuned gyroscope), or the hemispherical resonator gyroscope (HRG). Although these gyroscopes can provide good positional accuracy, these types of gyroscope are very expensive (>$10,000). Also, these types of gyroscopes large (> 50 cc) and also highly sensitive to shock. Micro Electromechanical Systems (MEMS) gyroscope technology has significantly advanced. They have excellent cost (<$50), size (< 1cc), and power (< 500mW); however, the bias instability of a MEMS gyroscope is too poor (> 100 degrees per hour) to be used for the autonomous vehicles application..
The Birdbath Resonator Gyroscope (BRG) Satisfies Accuracy Requirements of Future Mobility Applications
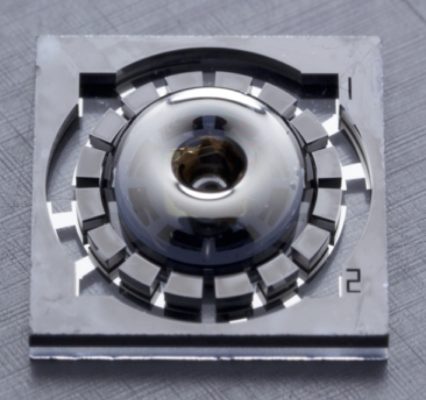
The birdbath resonator gyroscope (BRG) was developed at the University of Michigan in 2015. The BRG is an outcome of more than twenty years of research and development on a high-precision MEMS gyroscopes conducted at Professor Khalil Najafi’s research group at the University of Michigan, Ann Arbor. The BRG is a novel ultra-high-precision MEMS gyroscope that can meet the accuracy requirement for an IMU for autonomous vehicles and passenger drones. The BRG has an in-run bias greater than 0.05 degrees per hour, which is about 1,000 times more accurate than the MEMS gyroscopes made of silicon (Si) that are placed in a smartphone.
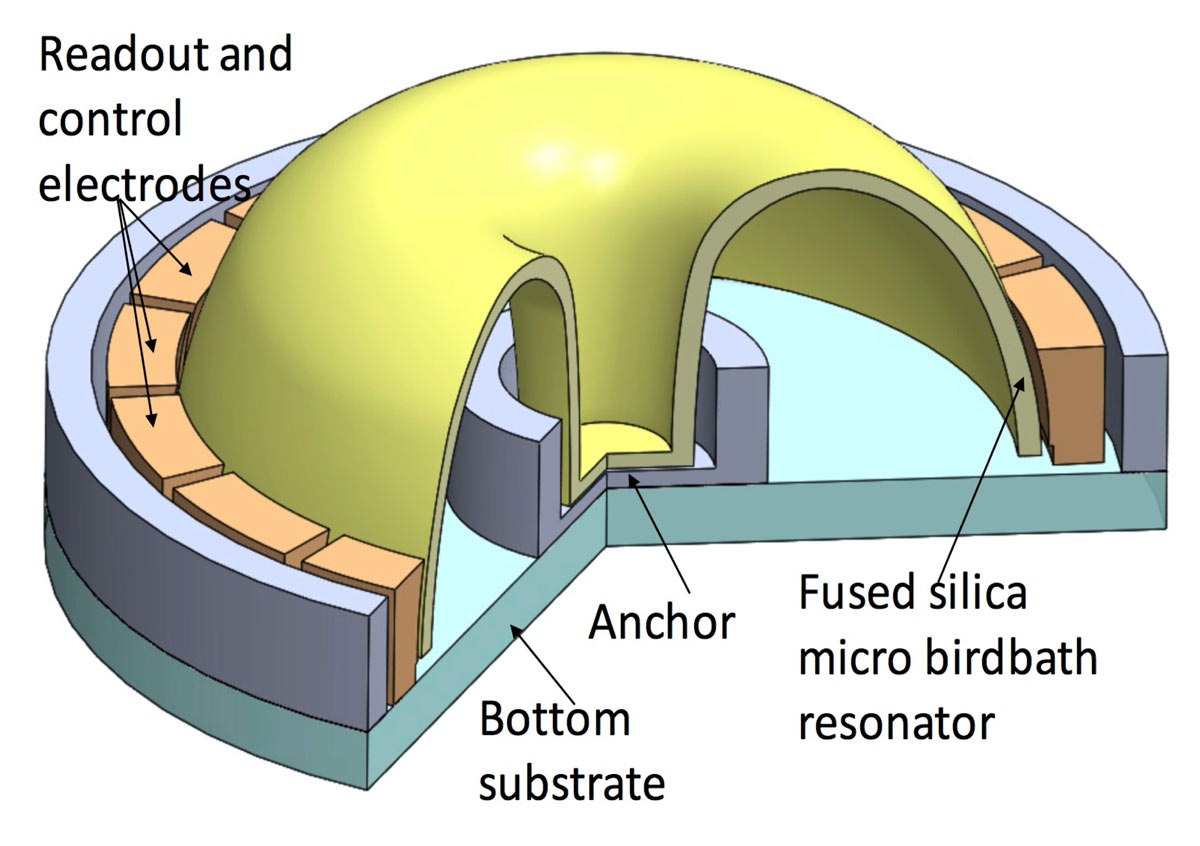
The bias instability and resolution (angle random walk) of a vibratory gyroscope is strongly impacted by the mechanical symmetry (i.e. symmetry of stiffness constants and damping constants) and the mechanical resonance quality factor (i.e. Q) of the resonator of a gyroscope. Many existing MEMS gyroscopes have resonators whose shapes are asymmetric (e.g. tuning fork). Also, the Q of a Si MEMS gyroscope is low (< 50,000) because Q is limited by the fundamental material properties of Si. Because of these challenges, Si gyroscopes have bias instability worse than 10-100 degrees per hour. The birdbath resonator gyroscope (BRG) overcomes these challenges and provide much better bias instability and angle random walk. This is because the resonator of the BRG has a completely symmetric shape, and it is made of fused silica, which is a material that can provide much greater Q than Si. Unlike Si MEMS gyroscopes, the resonator of a BRG has a shape of a three-dimensional hemisphere or a wineglass. The resonator has symmetric stiffness constants and damping constants. Also, Q factor of the BRG is much greater than 1-5 million, which is significantly greater than the Q of a Si MEMS gyroscope. The theoretical maximum Q of the BRG is >50 million! The cost of the BRG is comparable with the Si MEMS gyroscopes, and it is about 100 times cheaper than the cost of fiber optic gyroscopes (FOG) and ring-laser gyroscopes (RLG).
The chart below shows the relationship between Cost, Size, Weight, and Power (SWaP-C) and accuracy ( in-run bias stability) of existing gyroscopes versus the BRG technology. The BRG can achieve more than trillion times better CSWaP than FOG, RLG, and HRG. The BRG can achieve more than 10,000 times greater accuracy than commercial-grade MEMS gyroscopes.
Our technology is protected by many pending and granted US and international patents.
Click on an Image to Enlarge
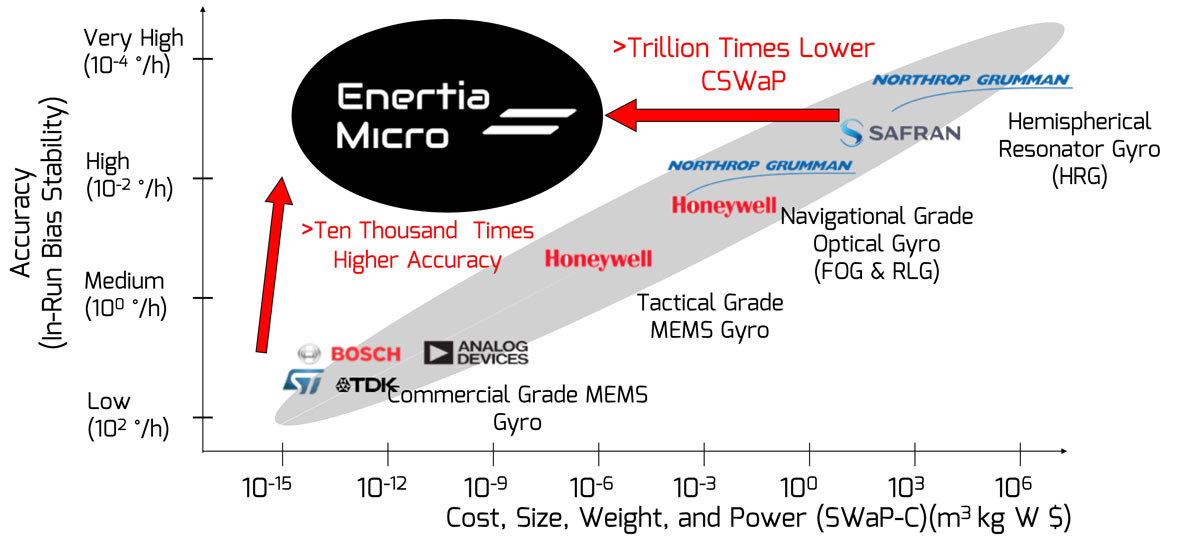
Enertia Micro’s BRG technology has disruptively better CSWaP and accuracy compared to existing gyroscope technologies.